Tiny Self-Guided Robots to the Rescue in High-Risk Environments
CAMBRIDGE, MA—Search and rescue efforts after major disasters are often a race against time. Help may be on the way in the form of tiny robots that can squeeze into small spaces to check for trapped people or other hazards. These so-called microrobots could be agile teammates to search-and-rescue personnel, but until now, such tiny tech has been largely held up in the research phase.
Engineers from Draper and Harvard University’s Wyss Institute for Biologically Inspired Engineering and Paulson School of Engineering and Applied Sciences (SEAS) are creating a small climbing robot, inspired by insects’ movements, with funding from a recently awarded DARPA grant. Designed to be just one centimeter in size, these microrobots are expected to be capable of object manipulation, jumping and climbing up walls—all autonomously. The team intends to add built-in smart sensors with the capability to alert the bots to their body position, self-movement and environment.
“The size of our robots is expected to be quite small, in fact insect scale, but we expect them to feature advanced technologies to enable them to navigate and accomplish complex tasks proficiently,” said Nicholas Zervoglos, an embedded systems engineer at Draper. “The microrobots, as designed, should be capable of working in partnership with people for search and rescue, disaster relief, hazardous environment inspection and other activities.”
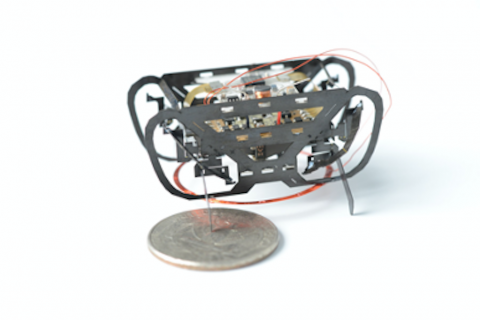
Working under a DARPA program called SHort-Range Independent Microrobotic Platforms (SHRIMP), the Draper and Harvard team is developing a multi-functional mm-to-cm-scale robotics platform. The starting point is the Harvard Ambulatory MicroRobot (HAMR), a biologically inspired 4-cm-long, 1.5 g quadrupedal microrobot developed at the Wyss Institute and SEAS.
To shrink the microrobot to 1 cm cubed, the engineers will use the latest in microelectromechanical systems (MEMS), additive manufacturing, piezoelectric actuators and low-power sensors. Utilizing these advanced capabilities should enable the microrobot to manipulate, jump, sense, navigate and control itself. Biologically-inspired friction feet will enable it to move on rough and vertical terrain, and a built-in inertial measurement unit will help it detect its location on the ground.
Another of the team’s planned innovations is a novel manufacturing process. Because of challenges involved in fabricating such mechanically complex devices like these highly capable robots with many degrees-of-freedom at the millimeter scale, the team plans to develop and utilize a wafer-scale process for rapid and repeatable mesoscale platform fabrication.
Harvard’s Robert Wood, Ph.D., a pioneer in microrobotics and a lead developer of HAMR, said, “Smaller robotics systems could provide significant aid, but shrinking down these platforms requires significant advancement of the underlying technology. In partnership with Draper, we are looking to make a contribution to the field by creating a generation of highly capable but extremely SWaP-constrained microrobotics.” Wood is a Core Faculty member at the Wyss Institute and the Charles River Professor of Engineering and Applied Sciences at SEAS.
DARPA is planning a series of Olympic-style events to test the microrobots at the conclusion of the three-year program. With areas of interest including untethered mobility, maneuverability and dexterity, the agency plans to test the bots using rock piling, steeplechase, biathlon and vertical ascent.
Released June 11, 2019